Significant advances in high-speed 3D imaging technology have been made in the last decade and there are now commercial, off-the-shelf, solutions for automatically evaluating infrastructure condition at high-speed. The technology deployed includes high-speed cameras, custom optics and laser line projectors to acquire both 2D images and high resolution 3D profiles of infrastructure surfaces at speeds up to 100 km/h.
By combining high vertical accuracy, intense artificial illumination, and rapid scanning rates, the LCMS is capable of collecting extremely precise and detailed data at speeds up to 100 km/h, day or night, on a wide variety of surface types.
Interestingly, new multi-functional 3D scanners can now be deployed to manage multiple types of assets across different modes of transportation such as:
• Roads and Highways
• Airport Taxiways, Runways and Aprons
• Tunnels
• Rail Systems
As the same technology is deployed across different modes there is a growing opportunity for “cross-pollination” of ideas and approaches for infrastructure assessment. This sharing of information can help solve problems in one domain through the adoption of solutions from another domain.
As well, such systems offer numerous advantages to the traditional manual inspection including:
• Improved safety to staff
– Day or night operation
– Improved speed of operation
– Improved accuracy and reliability of results
These new technologies allow the quality control of thousands of meters of runways, highways, rail and tunnels in a matter of minutes; thus helping to maximize facility uptime.
One such sensor is Pavemetrics’ LCMS. The LCMS has been continuously developed over the last decade through close collaboration of Pavemetrics (a “spin-off” of Canada’s National Optics Institute), the Ministry of Transportation of Quebec, numerous Infrastructure Management Consultants and various Departments of Transportation around the world. To date, more than 300 LCMS systems have been shipped to users in more than 35 countries around the world, including India.
This article describes the function of this technology and its application to the inspection of a wide variety of Transportation Infrastructure.
HARDWARE CONFIGURATION
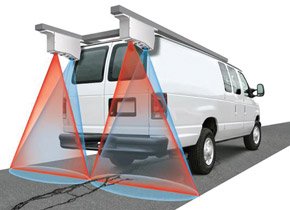
 The LCMS solution consists of two (2) or more fully synchronized 3D laser profilers mounted on an inspection vehicle, a high-resolution optical encoder to synchronize data acquisition, high-speed industrial computers, and sophisticated image processing algorithms.
The LCMS solution consists of two (2) or more fully synchronized 3D laser profilers mounted on an inspection vehicle, a high-resolution optical encoder to synchronize data acquisition, high-speed industrial computers, and sophisticated image processing algorithms.
The LCMS’ 3D laser profilers use high power laser line projectors, custom filters and a camera as the detector. Lasers are projected onto the surface to be inspected and its image is captured by the camera.
Compared to mobile LiDAR, which operates on the “time-of-flight” principle, Pavemetrics’ LCMS uses Laser Triangulation to make measurements. Consequently, the LCMS offers roughly ten (10) times the resolution and accuracy of a typical mobile LiDAR system; nearly 45,000,000 points a second with a vertical accuracy of 0.5mm compared to 400,000 points a second at an accuracy of 5mm.
Sensors simultaneously acquire both 3D “Range” (height of each pixel) and “Intensity” (the intensity of the reflected laser light for each pixel) images of the scanned surfaces. Images are digitized by high-speed frame grabbers and compressed in real-time using a proprietary data compression algorithm which reduces file size to just 1/40th the size of the raw images.
INTENSITY DATA
 Intensity profiles provided by the LCMS are used to form a continuous image of the scanned surface. Intensity images can be used to for a variety of purposes such as identifying the type and number of Foreign Object Debris (FOD) on a runway, the message contained in a pavement marking or the configuration of rail components on a railway track.
Intensity profiles provided by the LCMS are used to form a continuous image of the scanned surface. Intensity images can be used to for a variety of purposes such as identifying the type and number of Foreign Object Debris (FOD) on a runway, the message contained in a pavement marking or the configuration of rail components on a railway track.
Intensity images can also be used to detect highly reflective painted surfaces such as pavement striping and informational messages due to the fact that markings are highly contrasted against the surrounding pavement. With the proper pattern recognition algorithms, various markings can be identified and surveyed.
3D RANGE DATA
 The LCMS system acquires 3D data by measuring the distance from the sensor to the surface for every sampled point on the road. 3D features such as FOD on a runway, a crack in a road, or a missing fastener on a railroad track, can be spotted easily by converting elevation data into gray scale images.
The LCMS system acquires 3D data by measuring the distance from the sensor to the surface for every sampled point on the road. 3D features such as FOD on a runway, a crack in a road, or a missing fastener on a railroad track, can be spotted easily by converting elevation data into gray scale images.
In these images, the lighter the point, the higher the surface is; so features sitting on top of the surface being scanned (e.g. FOD on a runway) or near the surface (the top of a runway spike) appear light grey or white in range images whereas features whose depth extends beneath the top surface of the runway (e.g., cracks, raveling, rutting, potholes, etc.) appear as dark grey or black in colour.